成果介绍
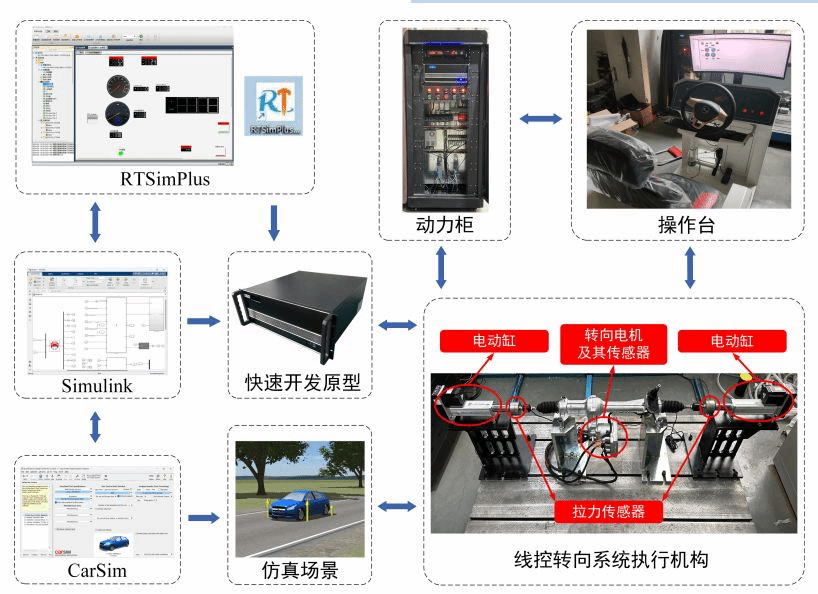
线控转向系统高精度仿真模型、路面附着系数分段精确估计、基于路面激励频率筛选的路感模拟、基于非合作博弈的人机共驾控制、基于熟练驾驶员转向驾驶特征学习进化的仿人智能转向技术、线控转向实物HIL台架测试验证。
应用场景
线控转向系统产品开发、线控底盘三轴向动力学融合控制与协同容错、线控底盘域控开发、极限工况下智能车辆漂移运动控制。